Modèle de lève-vitre avancé
Cet exemple représente une vitre électrique avancé comprenant une batterie, un commutateur, un moto-réducteur et la partie mécanique du système. Ce modèle est certes plus complexe à paramétrer, mais permet une meilleure description du système d'un point de vue mécanique :
il prend en compte les masses de la fenêtre et des bras mécaniques, les moments d'inertie ;
il prend en compte l'amortissement dans les articulations (pivots, glissières) ;
on a accès à des informations supplémentaires : le déplacement, la vitesse, l'accélération, la vitesse et l'accélération angulaire de différents points caractéristiques du système ;
on a accès aux forces et aux moments appliqués aux articulations.
Présentation du modèle
Le système, à bras rigide, est identique à celui rencontré dans le cas simple.
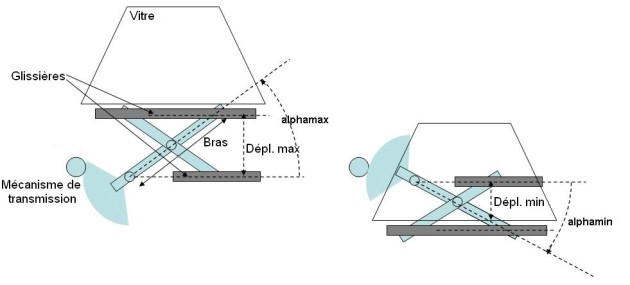
On considère trois éléments différents : le bras principal, le bras secondaire et la vitre. Ce modèle est détaillé ci-dessous.
la connexion arbre principal - moto-réducteur est représentée par une articulation pivot ;
le bras secondaire est au connecté au bras principal en son milieu par une liaison pivot ;
les deux extrémités supérieures des deux bras sont reliées à la glissière situé dans la barre soutenant la fenêtre ;
l'extrémité basse du bras secondaire est reliée à une autre barre fixe ;
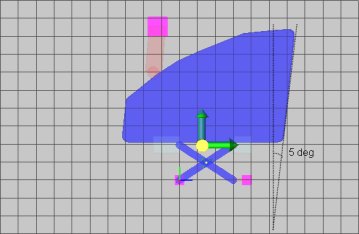
la fenêtre est guidée par deux joints formant un angle de 5° avec la verticale.
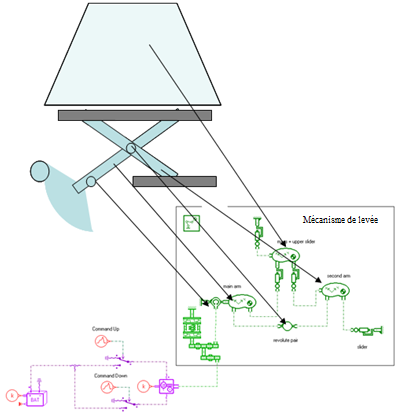
Pour plus de clarté, le modèle est représenté sous forme schématique ci-dessous :